
Leonardo es un robot bípedo.
Y es sorprendente.
LEONARDO, abreviatura de LEgs ONboARD drOne, lo que significa, en parte robot que camina, en parte drone volador, es un desarrollo innovador por las cosas que puede lograr.
Leo puede caminar en la cuera floja como equilibrista, saltar y andar en patineta.
Fue desarrollado por un equipo del Centro de Tecnologías y Sistemas Autónomos de Caltech.
Está equipado con dos patas y con cuatro propulsores de hélice. Las hélices aseguran que el robot esté en posición vertical mientras camina, y sus piernas cambian la posición de las piernas para mover el centro de masa del robot hacia adelante mediante el uso de un controlador sincronizado para caminar y volar. En vuelo, el robot usa sus hélices solo y vuela como un dron. 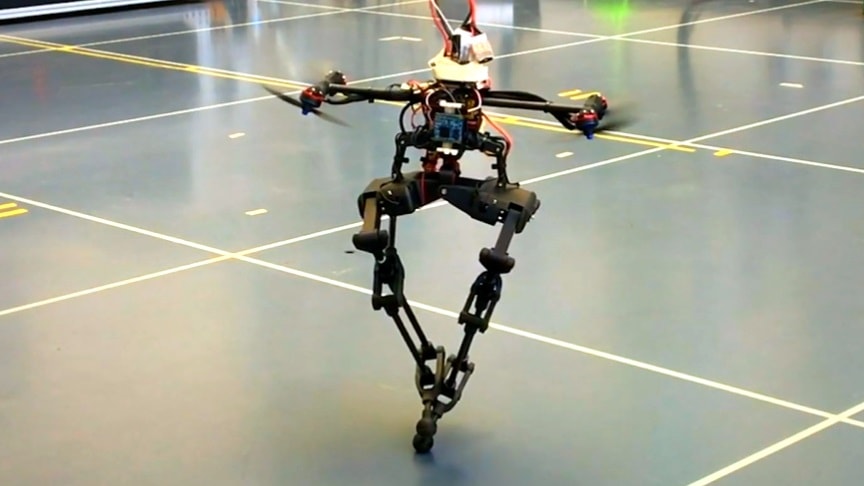 "Nos inspiramos en la naturaleza. Piense en la forma en que las aves pueden aletear y saltar para navegar por las líneas telefónicas", dice Soon-Jo Chung , autor correspondiente y profesor Bren de Aeroespacial y Control y Sistemas Dinámicos. "Un comportamiento complejo pero intrigante ocurre cuando las aves se mueven entre caminar y volar. Queríamos entender y aprender de eso".
"Nos inspiramos en la naturaleza. Piense en la forma en que las aves pueden aletear y saltar para navegar por las líneas telefónicas", dice Soon-Jo Chung , autor correspondiente y profesor Bren de Aeroespacial y Control y Sistemas Dinámicos. "Un comportamiento complejo pero intrigante ocurre cuando las aves se mueven entre caminar y volar. Queríamos entender y aprender de eso".
Esta clase de robot, capaz de abordar terrenos complejos: "Los robots con una capacidad de locomoción multimodal pueden moverse a través de entornos desafiantes de manera más eficiente que los robots tradicionales al alternar adecuadamente entre sus medios de movimiento disponibles. En particular, LEO tiene como objetivo cerrar la brecha entre los dos dominios dispares de locomoción aérea y bípeda que son no suelen estar entrelazados en los sistemas robóticos existentes ", dice Kyunam Kim, investigador postdoctoral en Caltech.
"Debido a sus hélices, puedes empujar a LEO con mucha fuerza sin golpear al robot", dice Elena-Sorina Lupu (MS '21), estudiante de posgrado en Caltech y coautora del artículo de Science Robotics. El proyecto LEO se inició en el verano de 2019 con los autores del artículo de Science Robotics y tres estudiantes universitarios de Caltech que participaron en el proyecto a través del programa Summer Undergraduate Research Fellowship del Instituto.

Esta tecnología sería capaz de fomentar el desarrollo de sistemas de tren de aterrizaje. Se espera que se utilice esto para que el equilibrio corporal se pueda mantener mientras aterrizan en terrenos inclinados o irregulares. De esta forma se disminuirían las fallas.

